











QR code

Over ons
Producten
Neem contact met ons op

Telefoon

E-mailen

Adres
Nr. 22, Hongyuan Road, Guangzhou, provincie Guangdong, China

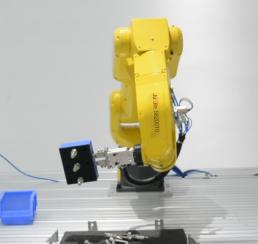
Met de snelle ontwikkeling van industriële automatisering, neemt de vraag naar zeer nauwkeurige en zeer efficiënte grijptechnologie met de dag toe. Als een belangrijke mechanische component beïnvloedt de precisie van het grijpproces van de zuigerstaaf direct de productkwaliteit en de productie -efficiëntie. In de afgelopen jaren heeft 3D Vision Technology een groot potentieel getoond op het gebied van zuigerstaaf grijpen vanwege de unieke voordelen.
3D Vision-technologie bereikt een precieze perceptie van objectvorm en houding door driedimensionale informatie van het object te verkrijgen. In Piston Rod Grabing kan 3D Vision Technology de voorwaartse en achterwaartse richtingen van de zuigerstang nauwkeurig identificeren, waardoor de robot een precieze grijp wordt uitgevoerd. In vergelijking met traditionele machinevisiesystemen heeft 3D -visie -technologie een hogere herkenningsnauwkeurigheid en sterker aanpassingsvermogen, en kan hij omgaan met zuigerstaven met verschillende vormen en houdingen.

Als een bedrijf met rijke ervaring op het gebied van 3D -visie, heeft Fuwei Intelligence met succes een zuiger staaf grijpoplossing ontwikkeld op basis van 3D -visie -technologie. Dit schema hanteert een grote veldcamera en ontwikkelde onafhankelijk ontwikkelde visuele algoritme om een zeer nauwkeurige herkenning en het grijpen van de zuigerstang te bereiken. In praktische toepassingen is deze oplossing met succes toegepast op meerdere productielijnen, waardoor de productie -efficiëntie en productkwaliteit aanzienlijk wordt verbeterd.
Met de voortdurende vooruitgang van technologie zal 3D Vision Technology een grotere rol spelen op het gebied van Piston Rod Grabing. In de toekomst kunnen we verwachten dat we intelligentere en efficiënte grijpsystemen zullen zien, waardoor meer gemak en waarde voor de industriële productie wordt gebracht.
Nr. 22, Hongyuan Road, Guangzhou, provincie Guangdong, China
