











QR code

Over ons
Producten
Neem contact met ons op

Telefoon

E-mailen

Adres
Nr. 22, Hongyuan Road, Guangzhou, provincie Guangdong, China

Projectoverzicht
Dit project is bedoeld om een efficiënt en stabiel automatisch laadsysteem voor dumptrucks te ontwerpen om te voldoen aan de laadbehoeften van klanten onder productieomstandigheden binnenshuis in de regio Shanxi. Het systeem moet onbemande werking en controle van technische voertuigen bereiken, waardoor alleen de afhandelings- en automatische laadfuncties van punten A en B worden voltooid om te voldoen aan de continue werkingseisen van de productielijn.
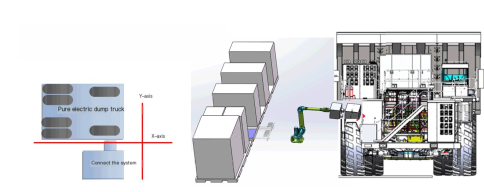
systeemsamenstelling
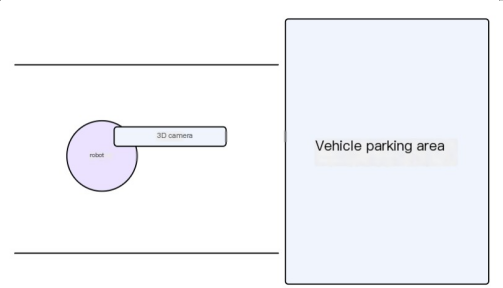
Visueel positioneringssysteem: gebruik van camera's en visuele algoritmen met hoge nauwkeurige om nauwkeurige positionering van de laadpoort op dumptrucks te bereiken. Het visuele systeem moet de mogelijkheid hebben om stof te weerstaan en zonlicht te leiden, waardoor stabiele werking in verschillende binnenomgevingen wordt gewaarborgd.
Robots en push -push -mechanismen: industriële robots met armspanne van 3 m of meer zijn geselecteerd, uitgerust met speciaal ontworpen pistool duwmechanismen. Het push -push -mechanisme moet voldoende stuwkracht en nauwkeurigheid hebben om ervoor te zorgen dat het laadpistool nauwkeurig en snel kan worden ingevoegd in de laadhaven.
Laadsysteem: uitgerust met krachtige laadapparatuur van 3 megawatt, zodat de dumper truck in korte tijd volledig kan worden opgeladen en de productie-efficiëntie kan verbeteren.
Controlesysteem: via een geïntegreerd besturingssysteem kan een precieze controle van visuele positionering, robotbeweging en laadproces worden bereikt. Het besturingssysteem moet hoge automatisering en intelligentiekenmerken hebben en in staat zijn om onbemande automatisch opladen te bereiken.
Workflow
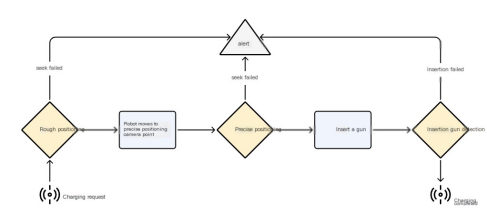
Positionering van zelfdumpende vrachtwagens: identificeer en plaats de oplaadpoort van de dumper door een visueel positioneringssysteem.
Robotbeweging: het besturingssysteem begeleidt de robot om in de buurt van de laadhaven van de dumper te gaan op basis van visuele positioneringsresultaten.
Pushing Gun Insertion: de robot is uitgerust met een push -pistoolmechanisme, dat het oplaadpoort nauwkeurig en snel in de laadhaven van de dumper truck plaatst.
Oplaadproces: het oplaadsysteem begint de dumptruck op te laden totdat deze het vooraf ingestelde stroomniveau of tijd bereikt.
Robotevacuatie: Nadat het opladen is voltooid, zal de robot de laadhaven evacueren en wachten op de aankomst van de volgende dumper.
Belangrijkste technologie
Visuele positioneringstechnologie: door algoritmen zoals diep leren te gebruiken, kunnen de nauwkeurigheid en stabiliteit van visuele positioneringssystemen worden verbeterd.
Robotcontroletechnologie: optimaliseer robotbewegingstraject en snelheid om de oplaadefficiëntie te verbeteren.
Ontwerp van het push -push -mechanisme: zorg ervoor dat het push -push -mechanisme voldoende stuwkracht en nauwkeurigheid heeft, terwijl het zijn structurele compactheid en betrouwbaarheid overweegt.
Risico -reactie
Bescherming binnenshuis: zorg voor een schone en droge binnenomgeving, vermindert de impact van stof en direct zonlicht op het visuele positioneringssysteem.
Hardware -onderhoud: Hardware zoals robots en visuele positioneringssystemen regelmatig onderhouden en onderhoud om hun normale werking te waarborgen.
Professionele evaluatie: nodig professionals uit om het push -push -mechanisme, het laadsysteem, enz. Te evalueren en te optimaliseren om de veiligheid en haalbaarheid van de oplossing te waarborgen.
Nr. 22, Hongyuan Road, Guangzhou, provincie Guangdong, China
