











QR code

Over ons
Producten
Neem contact met ons op

Telefoon

E-mailen

Adres
Nr. 22, Hongyuan Road, Guangzhou, provincie Guangdong, China

In de moderne productie -industrie die efficiëntie, precisie en automatisering nastreeft, wordt de toepassing van CNC -bewerkingstechnologie steeds wijdverbreider. Het laad- en losproces van CNC -machinetools wordt echter vaak een knelpunt dat de productie -efficiëntie beperkt. Om deze beperking te overwinnen, heeft Fuweii Intelligent een samengestelde robot CNC automatische laad- en losoplossing gelanceerd, het productieproces hervormd en de productie -efficiëntie en flexibiliteit verbetert.
Projectoverzicht
Dit project is bedoeld om automatisch laden en lossen van grondstoffen te bereiken tijdens CNC -bewerking, evenals noodzakelijke inspectie- en reinigingsprocessen. Door een composiet AGV (geautomatiseerd geleid voertuig) robotarmsysteem te introduceren, gecombineerd met scancamera's en het positioneren van vision -camera's, kunnen precieze en efficiënte materiaalbehandeling en procesbeheer worden bereikt.
Systeemsamenstelling
Composiet AGV Robotic ARM -systeem: bevat belangrijke componenten zoals AGV -body, robotarm, scancamera, positionering van vision camera, enz.
Controlesysteem: verantwoordelijk voor het ontvangen van taaksignalen van het ② Area Equipment System, het besturen van het AGV -robotarmsysteem om acties te voltooien zoals materiaalgrijpen, handling en plaatsing.
Scansysteem: door de QR -code op de materiaallade te scannen met een scancamera, kan materiaalinformatie worden ingevoerd en gevolgd.
Positiesysteem: gebruik van positioneringsvisiecamera's om precieze positionering en navigatie van AGV -robotarmsystemen te bereiken.
Workflow
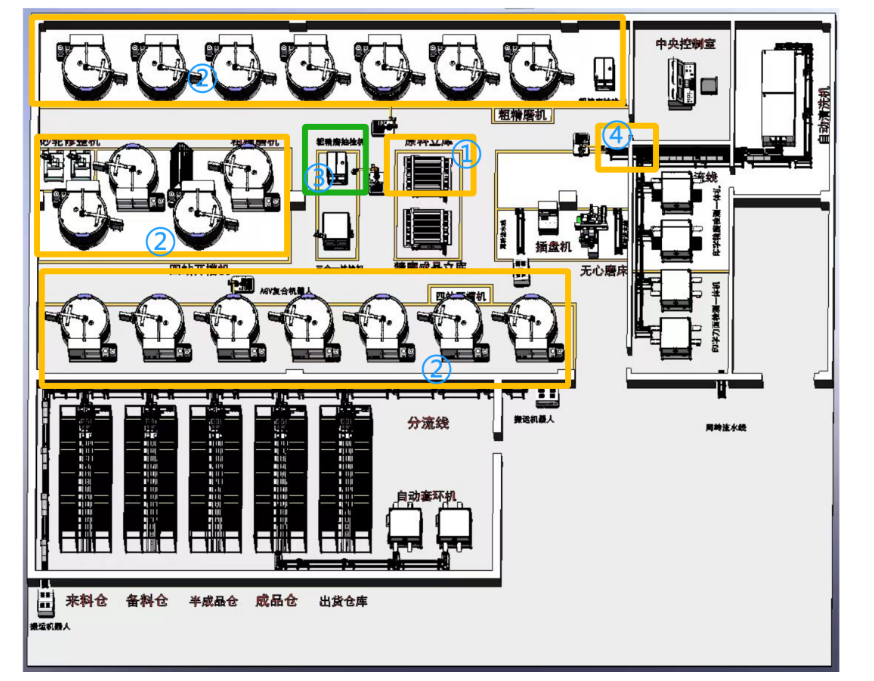
Grondstofpakkende: het composiet AGV robotarmsysteem gaat naar de eerste laag van de opslag van grondstof om de te verwachten materiaal te pakken volgens de instructies van het besturingssysteem.
Verwerkingsprocedure: Lever de vastgelegde materialen aan de machine in gebied ② ②, plaats ze volgens de interne plaatsingspositie van de machine en wacht op de verwerking.
Testproces (optioneel): als het systeem een testverzoek uitvoert, stuur dan de schimmelschijf vanuit de testpositie van de machine in gebied ② naar het plaatsingsgebied van testapparatuur in gebied ③ voor testen. Nadat de inspectie is voltooid, stuurt u de schimmelschijf terug naar de machine in gebied ②.
Reinigingsproces: plaats de materialen die worden verwerkt door de apparatuur in gebied ② op de transportleiding van de reinigingsmachine in gebied ④ ④ en het materiaalreinigingswerkzaamheden worden automatisch voltooid door de transportleiding.
Technische implementatie
Composiet AGV robotarmsysteem: het gebruik van geavanceerde AGV -technologie en robotachtige armtechnologie om een efficiënte en nauwkeurige materiaalbehandeling te bereiken.
Scansysteem: met behulp van hoogwaardige scancamera's om een nauwkeurige invoer en het bijhouden van materiaalinformatie te garanderen.
Positiesysteem: gebruik van geavanceerde visuele positioneringstechnologie om precieze positionering en navigatie van AGV -robotarmsystemen te bereiken.
Controlesysteem: het aannemen van een betrouwbaar besturingssysteem om de stabiele werking en efficiënte samenwerking van het hele systeem te waarborgen.
Systeemvoordelen
Hoge mate van automatisering: het realiseren van automatische laden en lossen, detectie en reiniging van grondstoffen in CNC -bewerkingsproces, waardoor de productie -efficiëntie wordt verbeterd.
Hoge precisie: door het gebruik van scancamera's en het positioneren van visuele camera's, kunnen nauwkeurige invoer en precieze positionering van materiaalinformatie worden bereikt.
Sterke flexibiliteit: de workflow kan flexibel worden aangepast aan de werkelijke behoeften om aan verschillende productie -eisen te voldoen.
Sterke traceerbaarheid: door een scansysteem te gebruiken om materiaalinformatie gedurende het hele proces te volgen en te traceren, kan het niveau van productkwaliteitsbeheer worden verbeterd.
Nr. 22, Hongyuan Road, Guangzhou, provincie Guangdong, China
