











QR code

Over ons
Producten
Neem contact met ons op

Telefoon

E-mailen

Adres
Nr. 22, Hongyuan Road, Guangzhou, provincie Guangdong, China

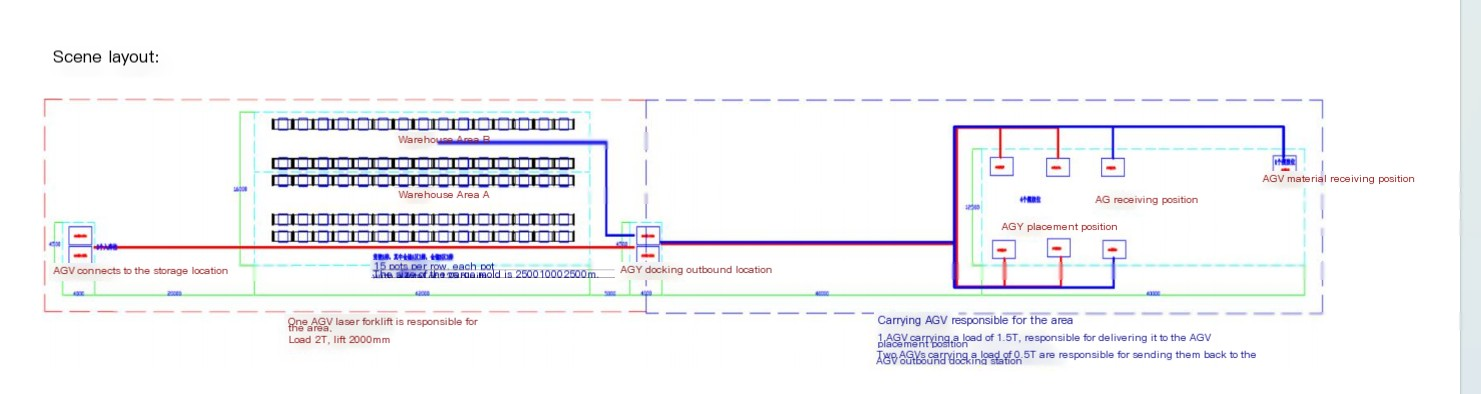
Het doel van dit project is om geautomatiseerd transport- en magazijnbeheer van pallets te bereiken. Door twee soorten geautomatiseerde apparatuur, AGV en laservorkheftruck te introduceren, wordt de transportefficiëntie verbeterd, wordt handmatige interventie verminderd en het proces wordt ervoor gezorgd dat het soepel en veilig is.
Productkenmerken en vereistenanalyse
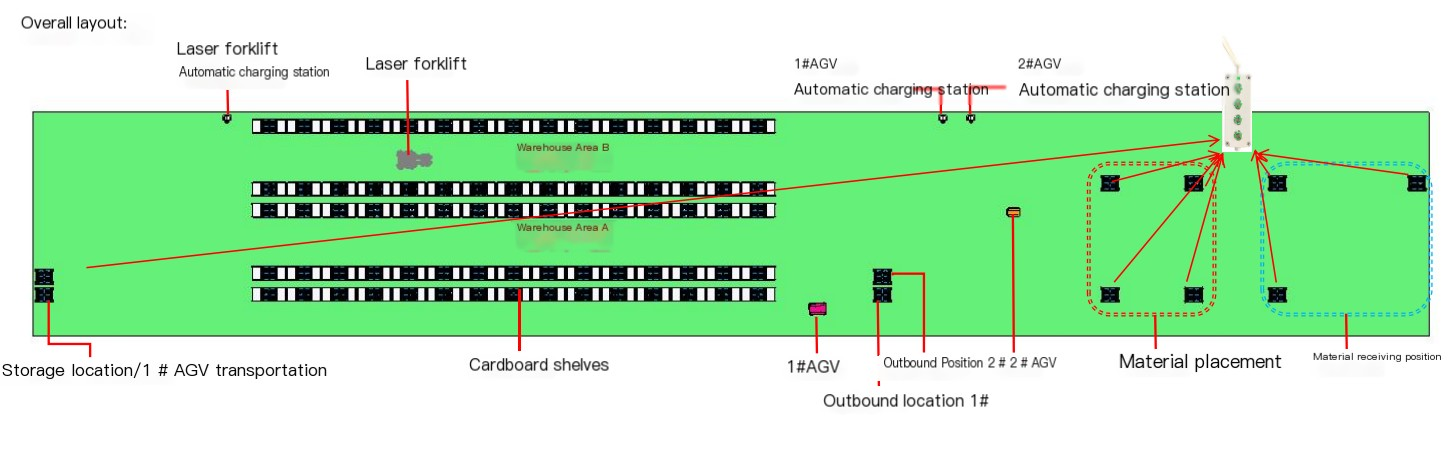
Gezien het feit dat het product een enkel type kaartbord is met een specificatie van 1200 mm * 1000 mm, hebben we de tillen en hanteren van trolley- en laservorkheftruck gekozen als kernapparatuur voor de oplossing. De trolley tillen en hanteren kan verschillende transportroutes selecteren op basis van handmatige signalen om flexibele behandeling van pallets te bereiken; Laservorkheftrucks zijn verantwoordelijk voor magazijnbeheer en de inkomende en uitgaande bewerkingen van pallets, waardoor de nauwkeurigheid en efficiëntie van inventaris worden gewaarborgd.
Workflowontwerp
Werkproces van het tillen en transporteren van trolley:
Codeer de materialen handmatig op de pallet en specificeer de opslag- en materiaalplaatsingsposities via roepsignalen;
Na ontvangst van het signaal reist AGV 1 # van de standby -positie naar de opslagpositie, verheft de pallet door het hefmechanisme en transporteert het naar de plaatsingspositie van de materiaal;
Wanneer de opslagpositie inactief is, kan AGV 1 # nieuwe behandelingstaken blijven ontvangen of terugkeren naar de standby -positie om te wachten;
Alle kanalen zijn gereserveerd met voldoende ruimte om ervoor te zorgen dat twee AGV's tegelijkertijd U-bochten kunnen uitvoeren.
Laser vorkheftruck workflow:
Wanneer er pallets wachten om in de opslagruimte te worden getransporteerd, verplaatst de laservorkheftruck zich van opslaggebied A naar de opslagruimte en gebruikt lasernavigatie om de pallets nauwkeurig te lokaliseren en te vervoeren naar de uitgaande locatie 1 #;
Wanneer de plaatsingspositie van materiaal inactief is, transporteert de laservorkheftruck de pallet van positie 1 naar de positie van de materiaalplaatsing voor latere bewerkingen;
Laservorkheftrucks zijn ook verantwoordelijk voor het verwerken van pallets tussen opslaggebieden A en B, waardoor tijdige aanvulling en aanpassing van de inventaris wordt gewaarborgd;
Laservorkheftrucks zijn zeer geautomatiseerd en intelligent, in staat om automatisch het optimale pad te plannen en de hanteringsefficiëntie te verbeteren.
Apparatuurconfiguratie en voordelen
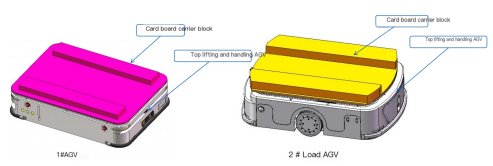
Top Tifting and Handling Trolley:
Het toepassen van navigatie- en positioneringstechnologie met een hoge nauwkeurigheid om de nauwkeurigheid en stabiliteit van transportroutes te waarborgen;
Het hefmechanisme is redelijk ontworpen en kan zich aanpassen aan de transportbehoeften van verschillende hoogten en veel pallets;
Uitgerust met flexibele communicatie -interfaces voor eenvoudige koppeling met handmatige signalen of andere apparaten.
Laser vorkheftruck:
Lasernavigatietechnologie zorgt ervoor dat vorkheftrucks nauwkeurig kunnen vinden en navigeren in complexe omgevingen;
In staat tot efficiënte hanteringssnelheid en stabiliteit, in staat om te voldoen aan de snelle responsbehoeften van magazijnbeheer;
Via een intelligent managementsysteem kunnen realtime updates en vragen van inventaris worden bereikt, waardoor de transparantie en nauwkeurigheid van magazijnbeheer worden verbeterd.
Door het tillen en hanteren van karren en laservorkheftrucks te introduceren, heeft dit project geautomatiseerd transport- en magazijnbeheer van pallets, verbeterde transportefficiëntie en nauwkeurigheid en verlaagde arbeidskosten en foutenpercentages bereikt.
Nr. 22, Hongyuan Road, Guangzhou, provincie Guangdong, China
