










QR code

Over ons
Producten
Neem contact met ons op

Telefoon

E-mailen

Adres
Nr. 22, Hongyuan Road, Guangzhou, provincie Guangdong, China

Met de continue ontwikkeling van intelligente productietechnologie wordt de toepassing van geautomatiseerde productielijnen op het gebied van de productie van magnetische staal steeds groter. Traditionele handmatige laad- en losmethoden hebben echter problemen zoals lage efficiëntie, onstabiele kwaliteit en aanzienlijke veiligheidsrisico's, die niet langer kunnen voldoen aan de behoeften van de moderne productie. Als reactie op deze kwesties stellen we een oplossing voor om Fuwei intelligente samengestelde robots te gebruiken voor magnetische staalbelasting en lossen, gericht op het verbeteren van de productie -efficiëntie, het verlagen van de arbeidskosten, het zorgen voor operationele veiligheid en het bereiken van automatisering en intelligentie in de productie van magnetische staal.
Pijnpunten in de industrie:
1. Hoge afhankelijkheid van handmatige werking leidt tot lage productie -efficiëntie en onstabiele kwaliteit;
2. Er zijn veiligheidsrisico's tijdens het werkingsproces, zoals ongevallen zoals handknijpen en impact;
3. Slechte werkomgeving vormt een potentiële bedreiging voor de gezondheid van operators;
4. Handmatige werking is moeilijk om aan de grootschalige en zeer efficiënte productiebehoeften te voldoen.

Overzicht van de behoeften en oplossingen van de klant
De vraag van de klant: de klant hoopt automatisch laden en lossen van magnetisch staal te bereiken via de intelligente composietrobot van Fuwei, waardoor de productie -efficiëntie en kwaliteitsstabiliteit wordt verbeterd. De specifieke vereisten omvatten het invullen en lossen van twee soorten producten, met een cyclustijd van ongeveer 80 seconden om het laden van twee stapels producten te voltooien en hoge precisievereisten te hebben.
Oplossingsoverzicht
We stellen het volgende renovatieplan voor om aan de behoeften van onze klanten te voldoen:
1. Vervang de motor- en servo -controller om de prestaties en stabiliteit van de robot te verbeteren;
2. Uitgerust met radarsavigatie, lichte strips en luidsprekers om de autonome navigatie, zichtbaarheid en interactiviteit van de robot te verbeteren;
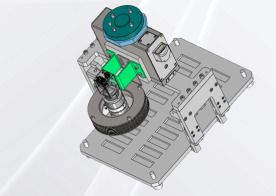
3. Ontwerp aangepaste grijpen die camera's en sensoren integreren om precieze identificatie en grijp van magnetisch staal te bereiken;
4. Optimaliseer de lay -out- en apparatuurconfiguratie van de laad- en losgebieden om ervoor te zorgen dat de robots hun werk nauwkeurig en efficiënt kunnen voltooien.
4 、 Gedetailleerde implementatie van renovatieplan
Samengestelde robottransformatie

Selecteer krachtige motoren en servo-controllers om de nauwkeurigheid en stabiliteit van robotbeweging te waarborgen;
Uitgerust met radarsavigatie om autonome positionering en padplanning van robots te bereiken;
Installeer LED -lichtstrips en alarmluidsprekers om de zichtbaarheid en interactiviteit van de robot te verbeteren;
Ontwerp aangepaste grijpen die camera's en sensoren integreren om precieze identificatie en aangrijpende magnetisch staal te bereiken.
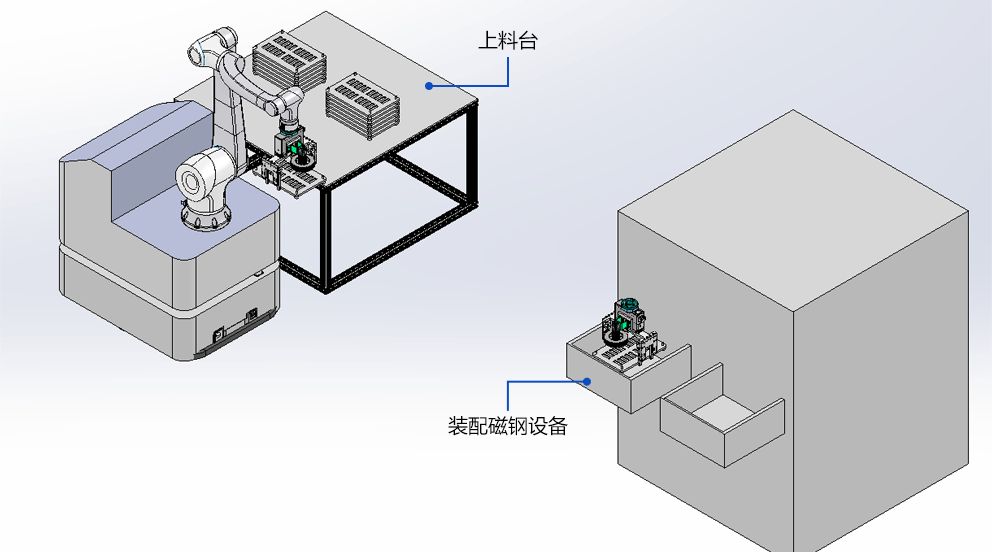
Optimalisatie van het laadgebied
Design Positioning Guide Slots om magnetisch staal in aangewezen posities te leiden;
Stel de bureaubladpositioneringsmarkers in om robotherkenning en positionering van grijppunten te vergemakkelijken.
Renovatie van het losgebied
Stel het apparaatpositioneringsmarkering in om ervoor te zorgen dat de robot het magnetische staal nauwkeurig plaatst;
Installeer de deuren van het elektrische bedieningspaneel en de glijdende slots voor elektrische besturing om operators tegen letsel te beschermen en geautomatiseerde apparatuur te bereiken.
Uitvoeringslogica en procesoptimalisatie
De uitvoeringslogica van de gehele oplossing is gebaseerd op het procesontwerp van geautomatiseerde productielijnen, waardoor de continuïteit en efficiëntie van de workflow worden gewaarborgd. Het hele proces wordt geactiveerd door een laadverzoek en de robot voert materiaalherstelbewerkingen uit op basis van of het laadgebied klaar is. Tijdens het plukken en plaatsen van materialen worden precieze herkenning en krachtcontrole bereikt door camera's en sensoren die in de grijper zijn geïntegreerd. Zodra de magneet succesvol op de apparatuur is geplaatst, bevestigt de robot de voltooiing van het laden en gaat u naar de volgende cyclus.
Door de intelligente composietrobot van Fuwei te gebruiken voor het laden en lossen van magnetisch staal, kunnen we de problemen van traditionele handmatige laad- en losmethoden effectief oplossen, de productie -efficiëntie verbeteren, de arbeidskosten verlagen en de operationele veiligheid garanderen. Tegelijkertijd heeft deze oplossing ook een hoge schaalbaarheid en flexibiliteit, die zich kan aanpassen aan de productie van de productie van magnetische staal van verschillende schalen en productiebehoeften.
Nr. 22, Hongyuan Road, Guangzhou, provincie Guangdong, China
