









QR code

Over ons
Producten
Neem contact met ons op

Telefoon

E-mailen

Adres
Nr. 22, Hongyuan Road, Guangzhou, provincie Guangdong, China

1 、 Projectoverzicht
Dit plan is bedoeld om een roboteducatiepraktijkplatformsysteem aan te passen om te voldoen aan de onderwijsbehoeften van een universitair laboratorium in machinevisie en krachtcontrole. Het systeem zal worden ontwikkeld rond de AUBO-I5 Collaborative Robot, Hikvision Industrial Camera, 3D Camera en Six Axis Force Sensor om functies zoals robotbesturing, visuele inspectie en krachtcontrole te bereiken en open-source bovenste computersoftware te bieden voor latere functionele expansie.

2 、 Systeemhardwaresamenstelling
Robot: Aubo-I5 Collaborative Robot aannemen, heeft het de kenmerken van hoge precisie en hoge veiligheid en is geschikt voor lesscenario's.
Camera: inclusief Hikvision Industrial Camera en 3D -camera, gebruikt om beeldinformatie van werkstukken te verkrijgen, de traditionele beeldverwerking en de diepe leerbeelddetectie te ondersteunen.
Six Dimensional Force Sensor: Kunwei (KWR75) of andere merken worden geselecteerd voor realtime monitoring van krachtinteractie-informatie tussen de robot-eindeffector en het werkstuk.
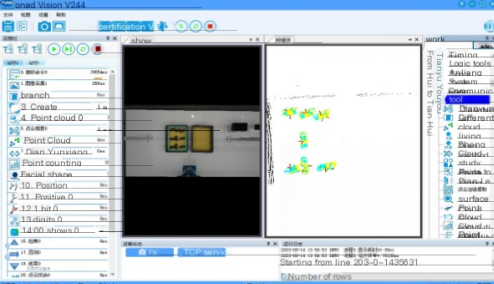
3 、 ontwerp van de bovenste computer software
Basisfuncties:
Robotbesturing: implementeer functies zoals verbinding, ontkoppeling, gewrichts- of houdingscontrole van robots.
Camerabeheersing: implementeer functies zoals cameraconnection, ontkoppeling en beeldverwerving.
Statusweergave: realtime weergave van de gewricht en pose -status van de robot, statusparameters van de zes -as krachtsensor en afbeeldingen gemaakt door de camera.
Exclusieve functies:
Assemblage van de asgat: door de werking van de bovenste computer, gecombineerd met visuele inspectie- en krachtcontroletechnologie, wordt de automatische assemblagefunctie van het asgat bereikt.
Interface -ontwerp: de bovenste computerinterface moet beknopt, duidelijk en gemakkelijk te bedienen zijn. De interface moet basisfunctieknoppen en een statusweergavegebied bevatten, evenals toegang tot de assemblagefunctie van de asgat.
4 、 Functie -implementatie
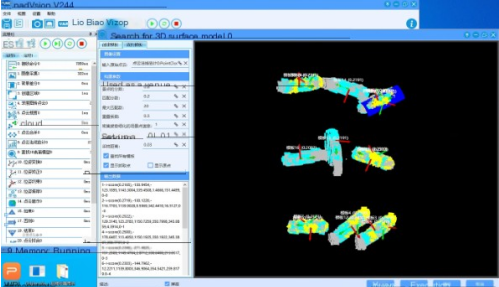
Machine Vision:
Traditionele beelddetectie: met behulp van sjabloonafstemming, cirkelaanpassing, randaanpassing en andere methoden om werkstukken te vinden en te herkennen, ter ondersteuning van de herkenning van barcodes, QR -codes, tekennummers, evenals de berekening van grijswaardengebied en plaathoeveelheid.
Diepdetectie van het leren: automatische herkenning en lokalisatie van werkstukken door middel van diep leeralgoritmen. Hoewel diep leren nog steeds handmatige annotatie van afbeeldingen vereist, zullen we ernaar streven om de trainingsefficiëntie en herkenningsnauwkeurigheid te verbeteren, waardoor de annotatie -werklast geleidelijk wordt verminderd.
Power Control Assembly:
Het combineren van gegevens van zes dimensionale krachtsensoren, bereik kracht -interactiecontrole tussen de robot -eindeffector en het werkstuk en volledige precieze assemblage van het asgat.
5 、 Projectrisico's en responsmaatregelen
Risico op samenwerking met zes askrachtsensoren: vanwege het gebrek aan samenwerking met zes askrachtsensoren kunnen er bepaalde technische problemen en onzekerheden zijn. We zullen een professioneel technisch team regelen om het probleem aan te pakken en de soepele integratie en stabiele werking van de sensoren te waarborgen.
Risico op het detecteren van de diepe leerafbeelding: Detectie van de diepe leerafbeelding vereist een bepaald niveau van herkenningsnauwkeurigheid en efficiëntie, terwijl het voldoen aan de vereiste van één klikopleiding. We zullen de diepe leeralgoritmen blijven optimaliseren om de nauwkeurigheid en efficiëntie van herkenningen te verbeteren, terwijl we manieren onderzoeken om één klikopleiding te implementeren.
6 、 Post -uitbreiding en scèneschakeling
De bovenste computersoftware hanteert het open source -ontwerp, dat functionele uitbreiding en scèneschakeling mogelijk maakt als dat nodig is in latere lessen. De assemblagescène van asgaten kan bijvoorbeeld worden overgeschakeld op taken zoals het ineenlopen van fijne versnellingen of herkenning en het grijpen van andere werkstukken. Door open-source programma's te wijzigen en op te debuggen, is het eenvoudig om robotbewerking en visuele detectiefuncties in verschillende scenario's te bereiken.
Dit plan integreert hardwarebronnen zoals robots, camera's en zes Axis Force Sensors, gecombineerd met open-source bovenste computer softwareontwerp, om een functie rijke en gemakkelijk uitbreidbare onderwijsomgeving te bieden voor het Robot Education Practice-platform. Door het gebruik van praktische platforms kunnen studenten een dieper inzicht krijgen in de principes en toepassingen van machinevisie en krachtcontroletechnologie en hun praktische en innovatieve vaardigheden verbeteren.
Nr. 22, Hongyuan Road, Guangzhou, provincie Guangdong, China
