










QR code

Over ons
Producten
Neem contact met ons op

Telefoon

E-mailen

Adres
Nr. 22, Hongyuan Road, Guangzhou, provincie Guangdong, China

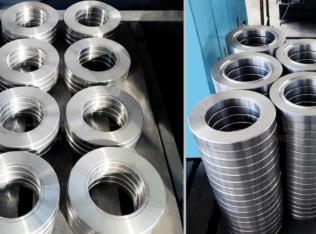
Naarmate de productie -industrie versnelt naar een grotere precisie en efficiëntie, zijn hogere vereisten op het niveau van automatisering en intelligentie in het productieproces geplaatst. Geconfronteerd met complexe en zeer precieze werkstukken zoals traagheidsringen, zijn traditionele laadmethoden onvoldoende geworden. Op dit moment heeft de opkomst van 3D Vision -technologie revolutionaire oplossingen voor dit probleem gebracht. Het verbetert niet alleen de nauwkeurigheid van voeding aanzienlijk, maar verbetert ook de flexibiliteit en efficiëntie van de productielijn aanzienlijk.
Het basisprincipe van 3D Vision-technologie is het verwerken en analyseren van de driedimensionale ruimtelijke informatie van objecten via computers en bewerkingen te bereiken zoals objectherkenning, detectie, tracking en meting. Bij de toepassing van precieze voeding van traagheidsringen legt 3D Vision-technologie de driedimensionale ruimtelijke informatie van de traagheidsring vast, waardoor de robot een nauwkeurige greeppositie en houding krijgt, waardoor de precieze voeding van de traagheidsring wordt bereikt.

In termen van beeldvormingsalgoritmen hanteert 3D Vision Technology geavanceerde algoritmen om het hoofd te bieden aan complexe situaties zoals oppervlaktereflectie en oliefilmdekking van traagheidsringen. Door algoritmen te optimaliseren, is het systeem in staat om duidelijke en nauwkeurige puntwolkgegevens te genereren, wat een solide basis biedt voor latere herkenning en vastlegging.
Wat de cameraselectie betreft, moeten 3D -visiesystemen camera's kiezen met een hoge resolutie, een groot gezichtsveld en een grote scherptediepte. Dit type camera kan de volledige vorm- en grootte -informatie van de traagheidsring vastleggen, zodat de robot de doelpositie tijdens het grijpproces nauwkeurig kan vinden. Tegelijkertijd stelt het kenmerk van de grote scherptediepte in staat om duidelijke beeldvormingseffecten op verschillende afstanden te behouden, waardoor de nauwkeurigheid van voeding verder wordt verbeterd.

Naast beeldvormingsalgoritmen en cameraselectie moet 3D Vision -technologie ook nauw worden geïntegreerd met robotbesturingssystemen. Door real-time driedimensionale ruimtelijke informatie van de traagheidsring naar het robotbesturingssysteem te verzenden, kan de robot de positie van de traagheidsring nauwkeurig vinden en grijpen uitvoeren. Deze realtime informatie-uitwisseling stelt robots in staat om hun grijpstrategieën snel aan te passen wanneer ze worden geconfronteerd met traagheidsringen van verschillende specificaties, waardoor flexibele productie wordt bereikt.
3D Vision Technology heeft een belangrijke rol gespeeld in het precieze voedingsproces van traagheidsringen. Door beeldvormingsalgoritmen te optimaliseren, geschikte camera's te selecteren en nauw samen te werken met robotbesturingssystemen, bereikt deze technologie een efficiënte en nauwkeurige grijp van traagheidsringen, verbetert de productie -efficiëntie en verlaagt de productiekosten.
Nr. 22, Hongyuan Road, Guangzhou, provincie Guangdong, China
