











QR code

Over ons
Producten
Neem contact met ons op

Telefoon

E-mailen

Adres
Nr. 22, Hongyuan Road, Guangzhou, provincie Guangdong, China

Slam, ook bekend als synchrone positionering en kaartconstructie, het is een cruciale kerntechnologie op het gebied van mobiele robottechnologie. Het stelt robots in staat om tegelijkertijd hun eigen positie te schatten en omgevingskaarten te construeren in onbekende omgevingen, wat de sleutel is tot het bereiken van autonome navigatie en verkenning.
1 、 Slam Technology Principle
Het kernidee van SLAM -technologie is het bereiken van zelflokalisatie en het in kaart brengen van robots in onbekende omgevingen door de fusie en verwerking van sensorgegevens (zoals Lidar, camera's, enz.). In het bijzonder bestaat SLAM-technologie uit twee hoofdonderdelen: front-end odometrie en back-end optimalisatie.
1. Kilometerteller vooraan: dit gedeelte is voornamelijk verantwoordelijk voor het schatten van het bewegingstraject van de robot via sensorgegevens. Het berekent de relatieve verplaatsing en houdingtransformatie van de robot door de veranderingen in sensorgegevens op opeenvolgende tijdstippen te analyseren. Gemeenschappelijke methoden omvatten functie-matching, optische stroom, enz. De uitgang van de front-end kilometerteller is een voorlopige schatting van de pose van de robot, maar vanwege sensorruis en geaccumuleerde fouten zijn deze schattingsresultaten vaak niet nauwkeurig genoeg.
2. Backend -optimalisatie: om de nauwkeurigheid van de positionering en kaartconsistentie te verbeteren, introduceert SLAM -technologie een backend -optimalisatieproces. Deze sectie maakt gebruik van historische gegevens, lusdetectie en andere methoden om de resultaten van de front-end kilometerteller te kalibreren en te optimaliseren. De veelgebruikte optimalisatiemethoden omvatten op filter gebaseerde methoden (zoals uitgebreid Kalman -filter, deeltjesfilter, enz.) En op grafiek gebaseerde optimalisatiemethoden. Deze methoden kunnen cumulatieve fouten effectief verminderen en de nauwkeurigheid van robotpositionering en kaartconstructie verbeteren.
3 、 De toepassing van SLAM -technologie in mobiele robots
SLAM -technologie, als een van de kerntechnologieën van mobiele robots, heeft brede toepassingsperspectieven op meerdere gebieden. Hier zijn verschillende typische toepassingsgevallen:
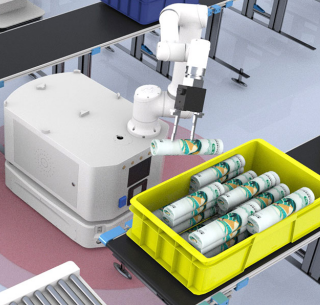
1. Autonome navigatie: op het gebied van opslag en logistiek, bewerking, enz., Moeten mobiele robots autonome navigatiefuncties bereiken. Door gebruik te maken van SLAM -technologie, kunnen robots hun omgeving in realtime waarnemen en kaarten construeren, waardoor het optimale pad plannen en autonoom naar de doellocatie gaan. Dit verbetert de werkefficiëntie en autonomie van robots aanzienlijk.
2. Milieuverkenning en modellering: in onbekende omgevingen kunnen mobiele robots SLAM -technologie gebruiken voor milieuverkenning en modellering. Door continu sensorgegevens te verzamelen en kaartinformatie bij te werken.
3. Interactie van menselijke machine en intelligente diensten: met de voortdurende ontwikkeling van kunstmatige intelligentietechnologie worden mobiele robots in toenemende mate toegepast op het gebied van interactie tussen menselijke machine en intelligente diensten. Door SLAM -technologie te gebruiken om precieze positionering en scene -herkenning te bereiken, kunnen robots gebruikers een meer gepersonaliseerde en intelligente service -ervaring bieden. Bijvoorbeeld, het begeleiden van klanten in winkelcentra en bijbehorende ouderen thuis hebben brede toepassingsperspectieven.
SLAM -technologie, als een van de kerntechnologieën van mobiele robots, biedt sterke ondersteuning voor het bereiken van autonome navigatie en milieu -exploratie. Tegelijkertijd moeten we, in het licht van complexe en steeds veranderende toepassingsscenario's en constant upgraden van gebruikerseisen, ook aandacht besteden aan en onderzoek doen naar nieuwe SLAM-technologieën en methoden om de verdere ontwikkeling en toepassing van mobiele robottechnologie te bevorderen.
Nr. 22, Hongyuan Road, Guangzhou, provincie Guangdong, China
